【1】概述-pcduino平台下的智能小车
本文使用飞思卡尔汽车模型,它配备了直流电机和模拟电路控制舵机,用来模拟真实汽车。汽车模型上搭载的PcDuino开发板,搭载了Ubuntu操作系统,并兼容Arduino扩展实现硬件控制,与开发板连接的双目摄像头可以采集两路视频并通过网络实时传输,为双目视觉测距提供支持;同时开发出“视觉辅助导航系统”Android端应用,可以远程实时查看智能汽车周围实况和控制汽车。
一、概论
Arduino开源硬件平台的出现大大提高了硬件开发的效率,即使是没有任何硬件基础的软件程序员,只要通过使用Arduino提供的开源库,就可以编写简单的代码对硬件进行控制,使用Arduino平台大大降低了本设计的难度。 Arduino还提供了多种型号的扩展板, Arduino生态圈的强大,许多开发者为Arduino开发出周边扩展模块,例如电机模块,红外线控制模块,触摸模块,这些模块大大增强了Arduino的功能,我们可以根据项目需求购买模块,就像拼接积木一样创造出自己的创新作品。但是,Arduino无法胜任大量运算和高复杂度的工程应用,只能做一些对性能要求不高的简单工作,这是受到Arduino的硬件和软件两方面限制的。 目前大部分的Arduino主板都使用MCU作为处理器, 例如Arduino Uno的ATmega328单片机,主频只有16MHz, 内存是只有2KB的SRAM,所以运行速度、代码规模、计算能力都十分有限。此外,如果有一些复杂的工程,需要Linux操作系统支持,Arduino显然是不能达到要求的,比如你想通过一个Arduino做openCv人来做人脸识别。 而pcDuino的出现则解决了这一问题,它基本相当于一款Mini PC,配备高性能的ARM处理器,同时,它又兼容Arduino硬件平台,并能运行Linux和Android操作系统系统,是一个软硬件相结合的开放应用开发平台。[2] 兼容Arduino意味着pcDuino不仅可以使用Arduino的扩展模块,还能兼容Arduino的项目代码,在pcDuino完成Arduino编程。
二、硬件选型
PcDuino开发平台
根据需求有众多的版本的开发板,由于本文需要远程控制小车(需要WIFI功能),同时能获取两路摄像头视频(可扩展的USB接口),于是选用了配备1GHz主频的AllWinner A20 SoC ARM中央处理器、无线Wifi网卡的PcDuino 3B型号。 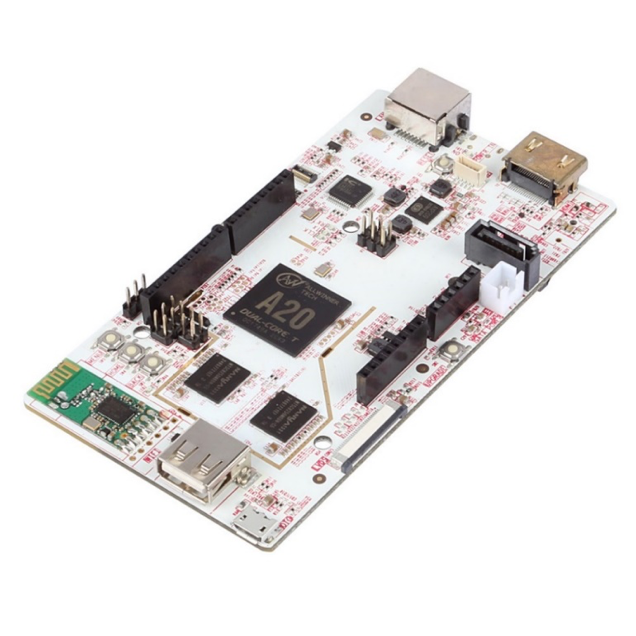
电机驱动模块L298P
智能控制的关键之一是对速度的控制,本文使用L298P电机驱动模块对智能小车进行驱动。L298P Shield直流电机驱动器可直接驱动直流电机,驱动电流达2A,并可以通过PWM进行调速,可插接到Arduino上使用,同时它还配备了一个舵机控制插口控制舵机,和蜂鸣器可用于倒车警报。 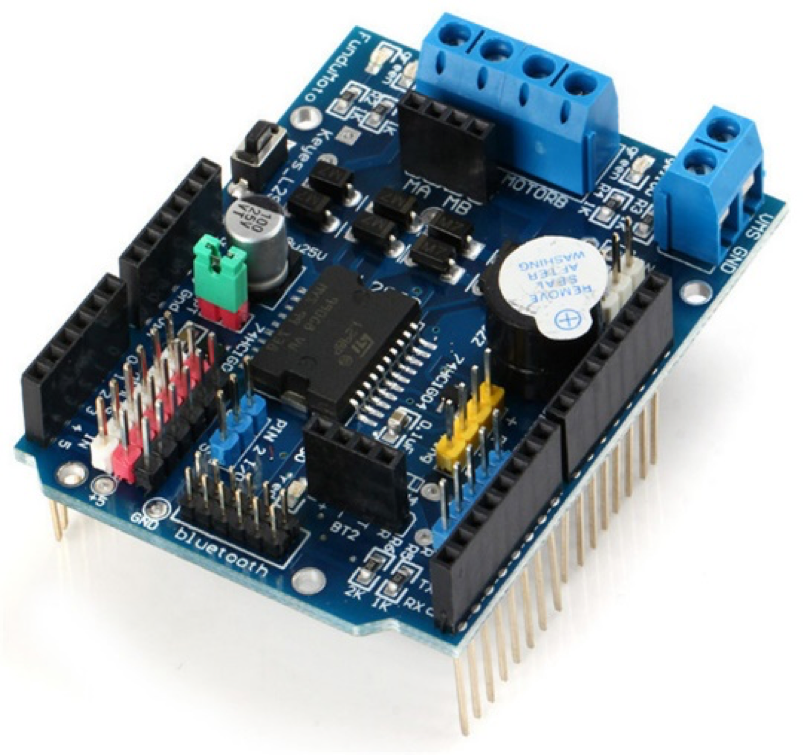
舵机控制模块
舵机控制模块是由直流电机、减速齿轮组、控制电路组成的转向控制系统。通过舵机的控制信号,可以指定输出轴的旋转角度,当输入特定角度的控制信号后,舵机会产生偏向这个角度的转动,如果控制信号持续一段时间,舵机会偏到这个角度之后保持静止。舵机模块除了应用于汽车模型的转向,还应用于机器人手臂控制、航模等等。
飞思卡尔车模
双目摄像头
双目摄像头就是具有两个镜头的摄像头,随着VR和3D视频技术的发展,双目摄像头在一些VR摄像机、手机上得到广泛的应用。双目摄像头模仿人的双眼,通过两个摄像头拍摄的不同画面,可以应用于计算机视觉测距。 下图为市场上购买的双目摄像头模块,可以通过USB接口与PC、开发板等相连,同时支持UVC协议。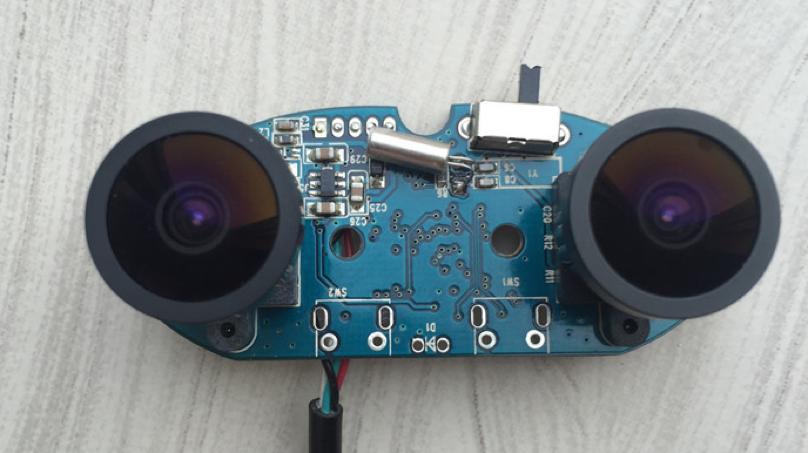
感谢楼主的分享,赞赞。